


















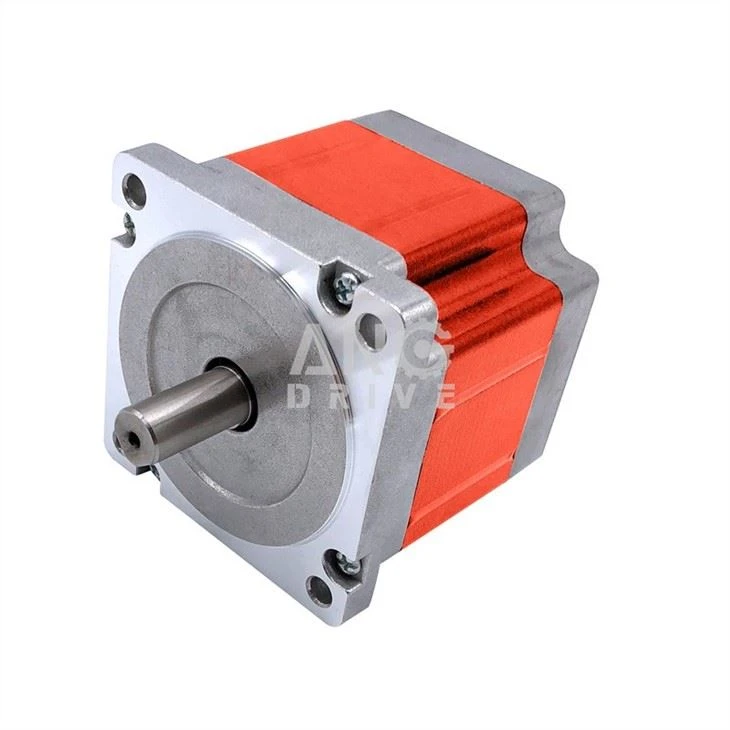

Motor Melangkah Magnetik
Parameter teknik:
Nama Produk | motor loncatan magnet |
Ukuran | Nema 8(20mm), 11(28mm), 14(35mm), 16(39mm), 17(42mm), 23(57mm), 24(60mm), 34(86mm) |
Sudut langkah | Gelar 0.9, 1.2, 1.8 (Opsional atau Disesuaikan) |
Torsi | Hingga 350mNm tanpa gearbox |
Nilai Saat Ini | 0.1A~10A (A/Fase) |
Jenis gigi: | Motor roda gigi planet, motor roda gigi cacing, motor roda gigi heliks |
Mengapa memilih motor listrik stepper kami?
Keuntungan ● Akurasi tinggi ● Kebisingan rendah ● Kenaikan suhu rendah ● Harga rendah ● Garansi panjang |
|
| Kecepatan seragam, tidak'tidak kehilangan langkah ANG memberi energi setiap fase secara berurutan, motor akan berputar satu langkah pada satu waktu Laher Performa stabil Umur panjang lebih dari 5000 jam |
100% kawat berenamel tembaga murni ● Kenaikan suhu rendah ● Pertahankan kinerja tinggi dalam jangka panjang |
|
| ● Torsi penahan tinggi ● Berjalan lancar ANG menggunakan struktur baja magnetik ganda |




Kontrol penggerak subdivisi dari motor loncatan
Motor loncatan dibatasi oleh proses pembuatannya sendiri. Misalnya, ukuran sudut langkah ditentukan oleh jumlah gigi rotor dan ketukan berjalan, tetapi jumlah gigi rotor dan ketukan berjalan dibatasi. Oleh karena itu, sudut langkah motor loncatan umumnya besar dan tetap, dengan resolusi langkah rendah, kurangnya fleksibilitas, getaran pada frekuensi rendah, dan kebisingan yang lebih tinggi daripada motor mikro lainnya, Membuat perangkat fisik mudah lelah atau rusak. Kekurangan tersebut membuat motor stepper hanya dapat digunakan pada beberapa kesempatan dengan kebutuhan yang rendah. Untuk acara-acara dengan persyaratan tinggi, itu hanya dapat mengadopsi kontrol loop tertutup, yang meningkatkan kompleksitas sistem. Kekurangan ini sangat membatasi pemanfaatan efektif motor stepper sebagai komponen kontrol loop terbuka yang sangat baik. Teknologi penggerak subdivisi secara efektif mengatasi kekurangan ini sampai batas tertentu.
Teknologi penggerak subdivisi motor loncatan adalah teknologi penggerak yang dikembangkan pada pertengahan 1990-an, yang secara signifikan dapat meningkatkan kinerja komprehensif motor loncatan. Dalam, sarjana Amerika pertama kali mengusulkan metode kontrol subdivisi sudut langkah motor loncatan pada pertemuan tahunan sistem dan perangkat kontrol gerak inkremental Amerika. Dalam dua puluh tahun berikutnya, penggerak subdivisi motor melangkah telah sangat berkembang. Lambat laun berkembang menjadi dewasa penuh pada tahun 1990-an. Penelitian tentang teknologi penggerak subdivisi di China hampir sama dengan penelitian di luar negeri.
Pada pertengahan 1990-an, ekonomi China' mengalami perkembangan yang luar biasa. Hal ini terutama digunakan dalam industri, kedirgantaraan, robotika, pengukuran presisi dan bidang lainnya, seperti theodolite fotolistrik untuk melacak satelit, instrumen militer, komunikasi dan radar. Penerapan teknologi penggerak subdivisi yang luas membuat jumlah fasa motor tidak dibatasi oleh sudut langkah, yang memberikan kemudahan pada desain produk. Saat ini, dalam teknologi penggerak subdivisi motor loncatan, penggerak arus konstan chopper, penggerak modulasi lebar pulsa instrumen dan kontrol penggerak rotasi seragam amplitudo konstan vektor arus diadopsi, yang sangat meningkatkan akurasi operasi motor loncatan dan membuat motor loncatan berkembang di arah kecepatan tinggi dan presisi di bidang aplikasi daya menengah dan kecil.


Tag populer: motor loncatan magnet, Cina, pemasok, produsen, pabrik, grosir, harga
Sepasang
Motor berulangBerikutnya
Langkah MotorAnda Mungkin Juga Menyukai






Kirim permintaan